
In [6]:
import numpy as np
from numpy.linalg import eig
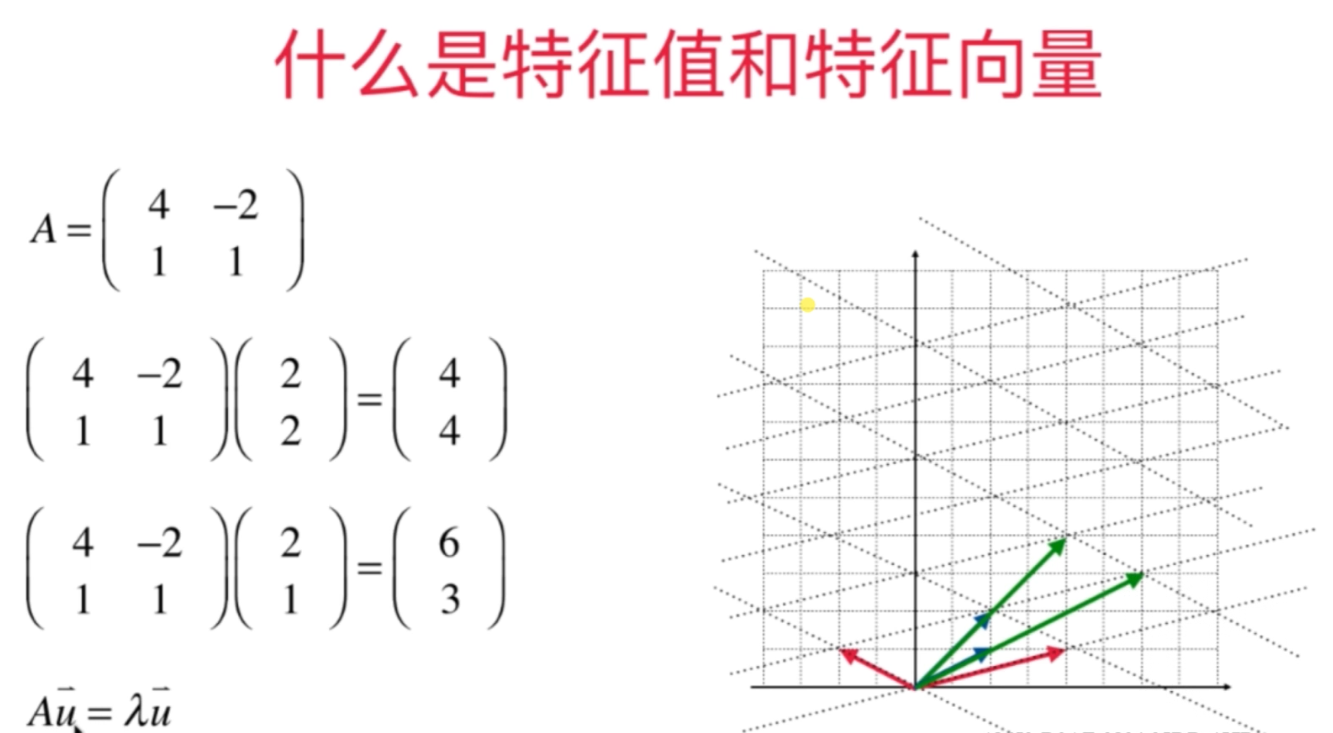
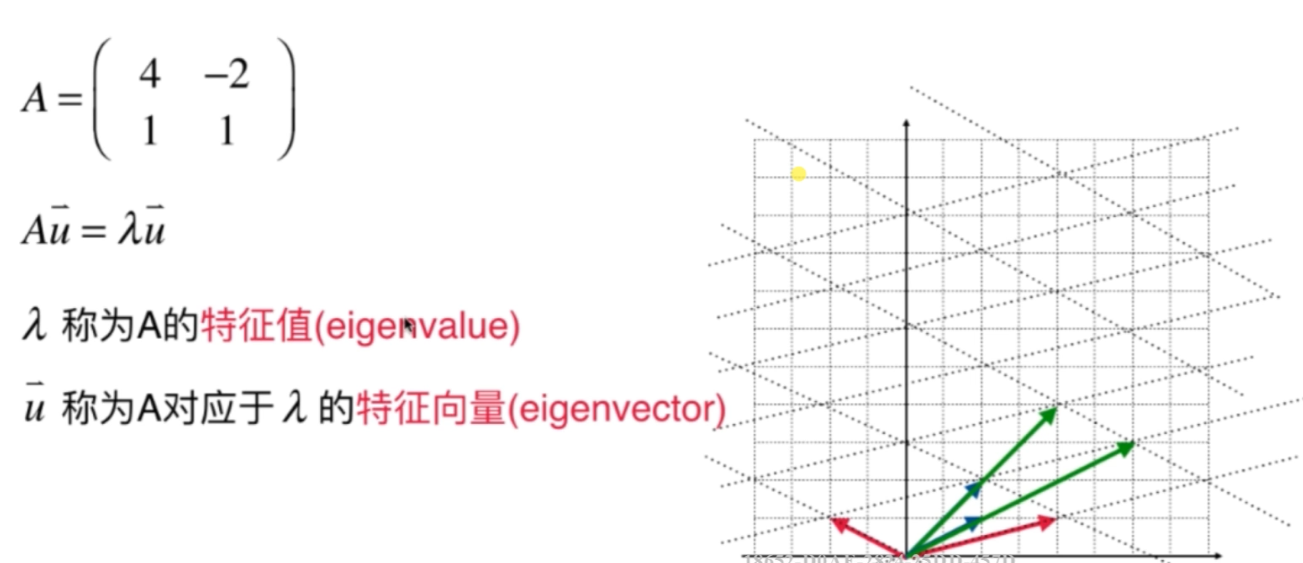
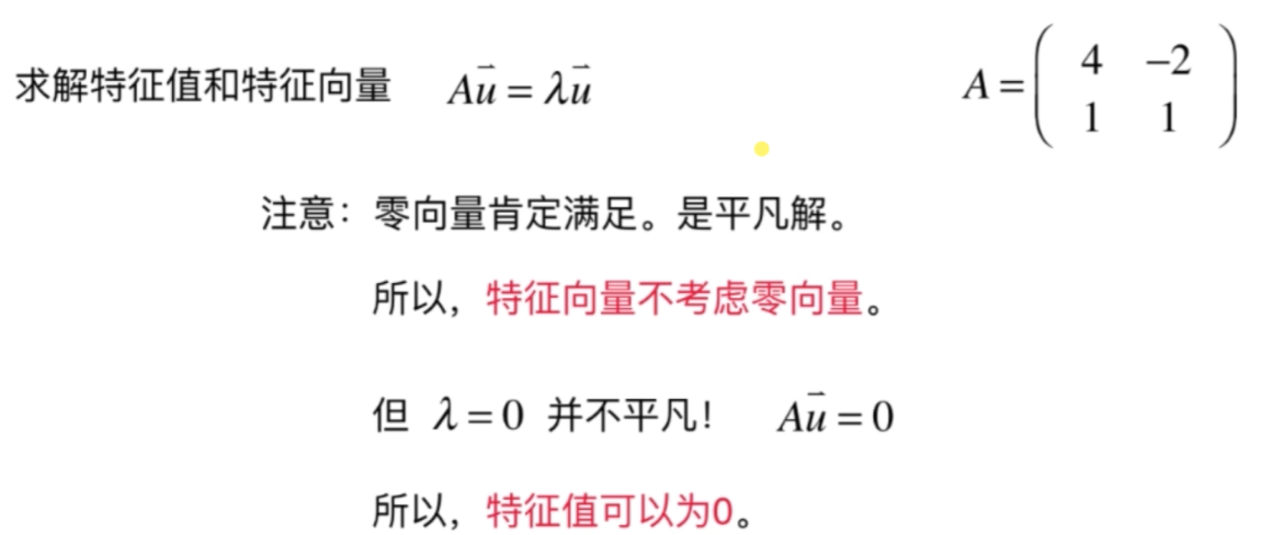
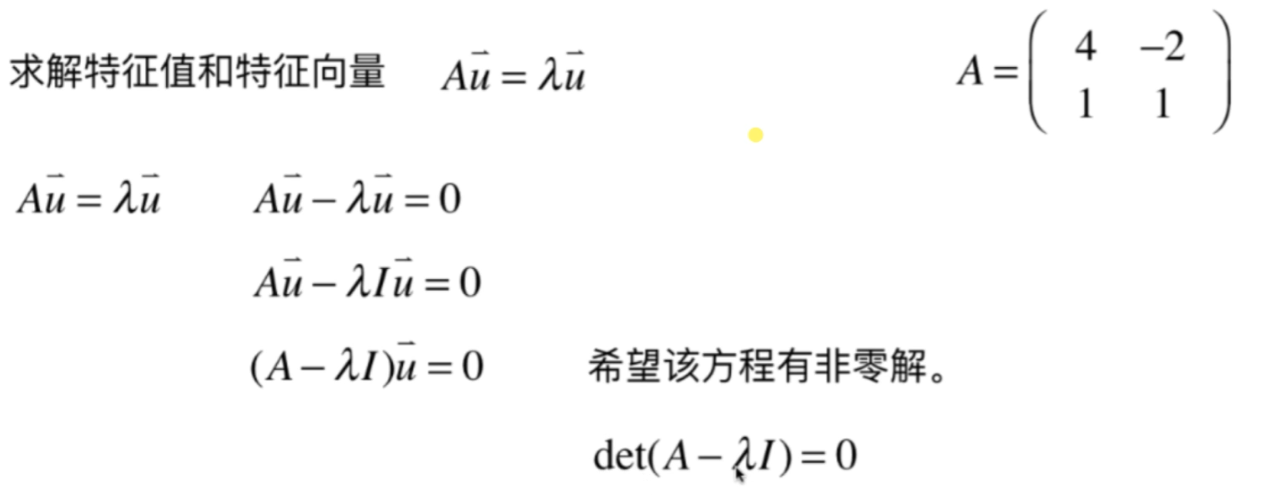
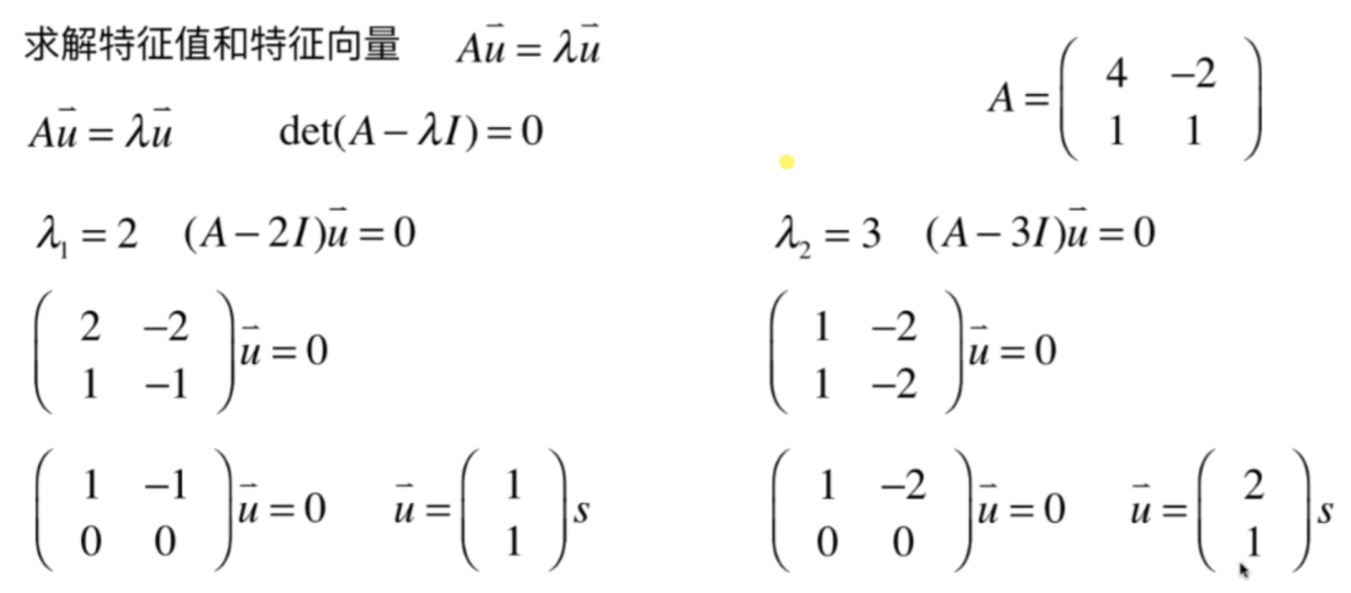
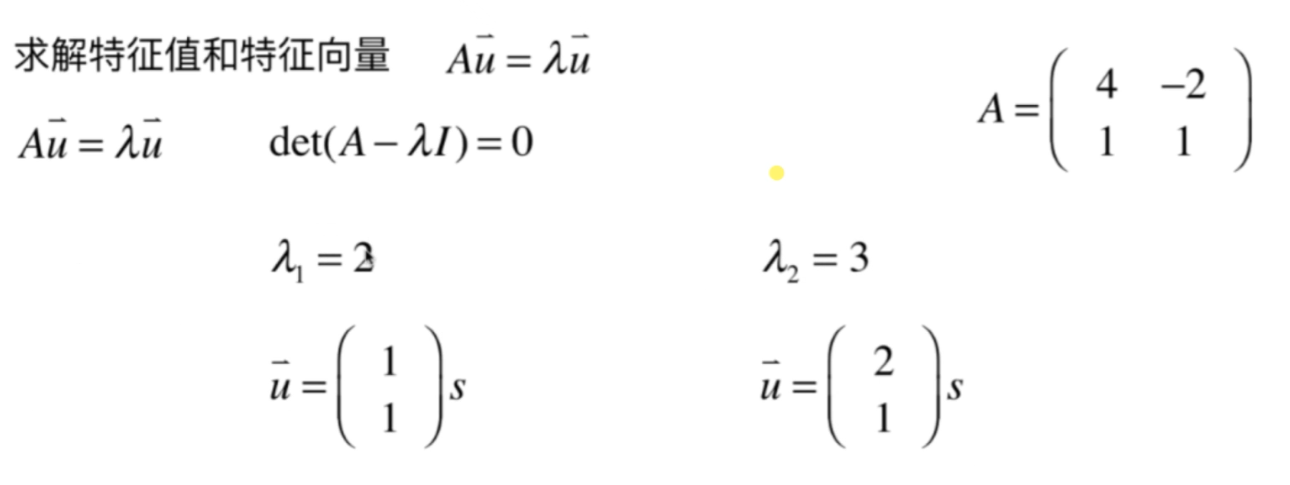
A1=np.array([[4,-2],[1,1]])
eigenvalues1, eigenvectors1 = eig(A1)
print(eigenvalues1)
print(eigenvectors1)
print()
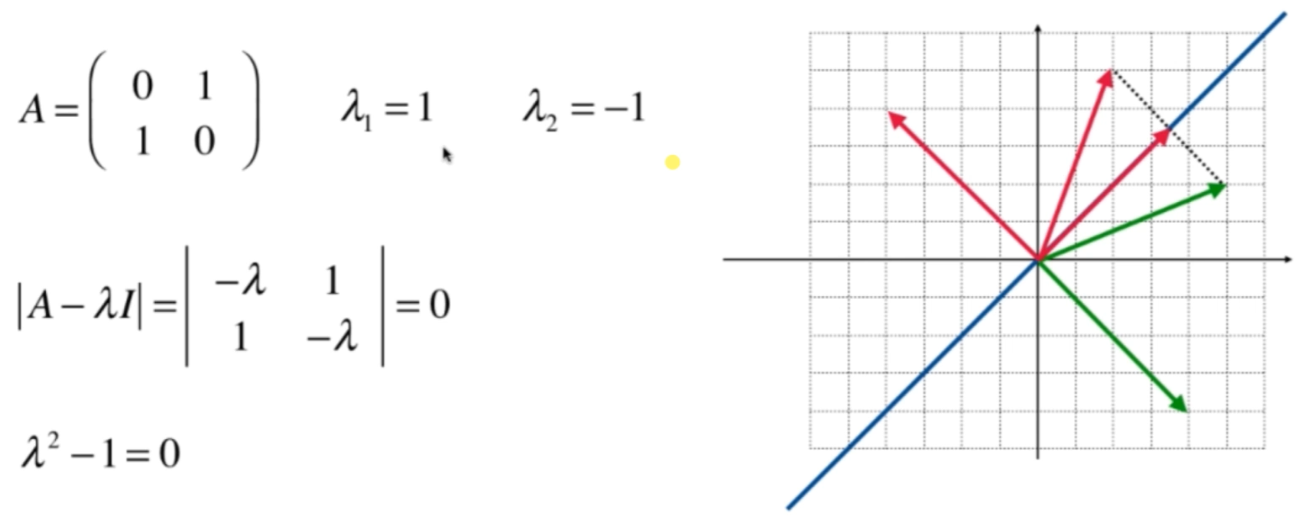
# 关于 y=x 翻转
A2=np.array([[0,1],[1,0]])
eigenvalues2, eigenvectors2 = eig(A2)
print(eigenvalues2)
print(eigenvectors2)
print()
# 旋转90度
A3=np.array([[0,-1],[1,0]])
eigenvalues3, eigenvectors3 = eig(A3)
print(eigenvalues3)
print(eigenvectors3)
print()
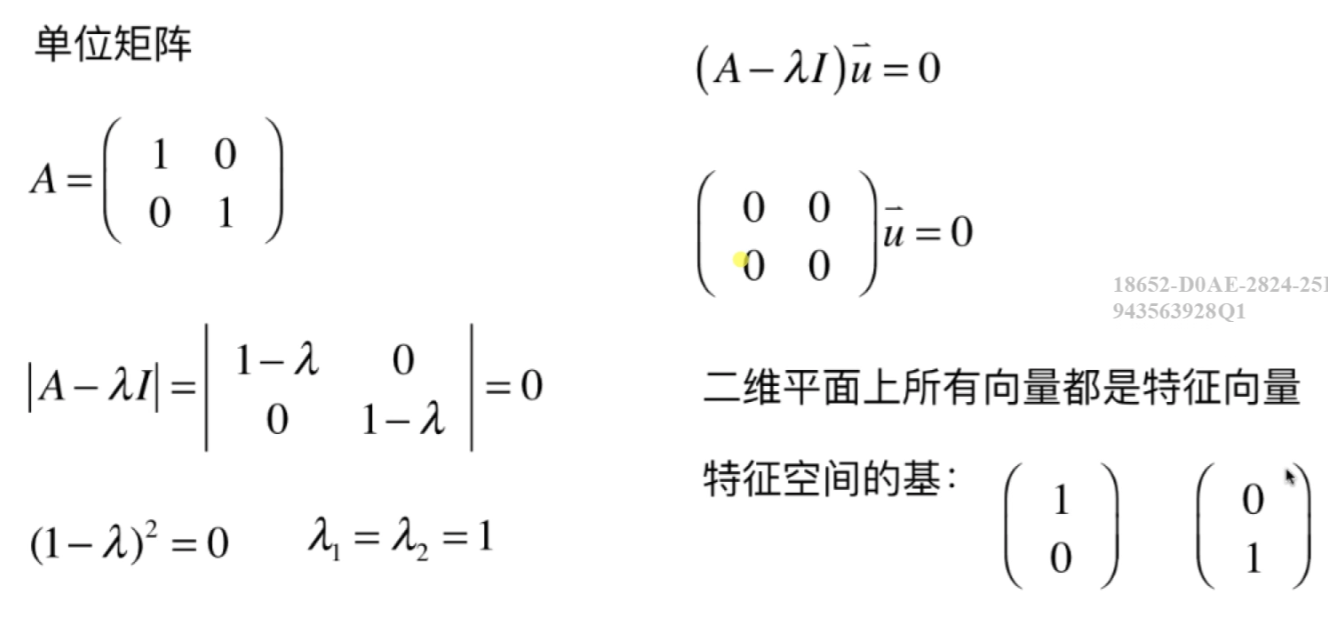
# 单位矩阵
A4=np.array([[1,0],[0,1]])
eigenvalues4, eigenvectors4 = eig(A4)
print(eigenvalues4)
print(eigenvectors4)
print()
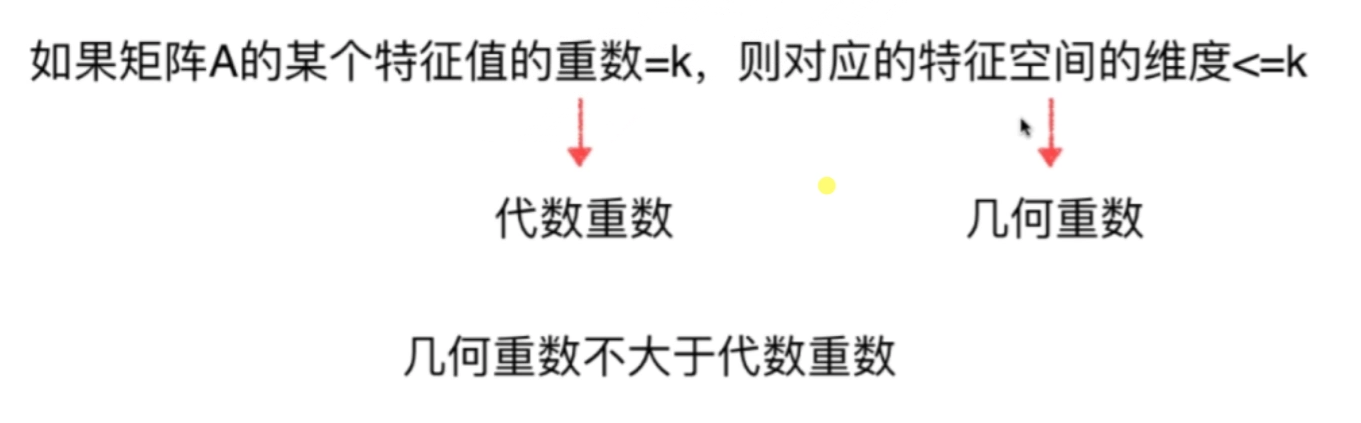
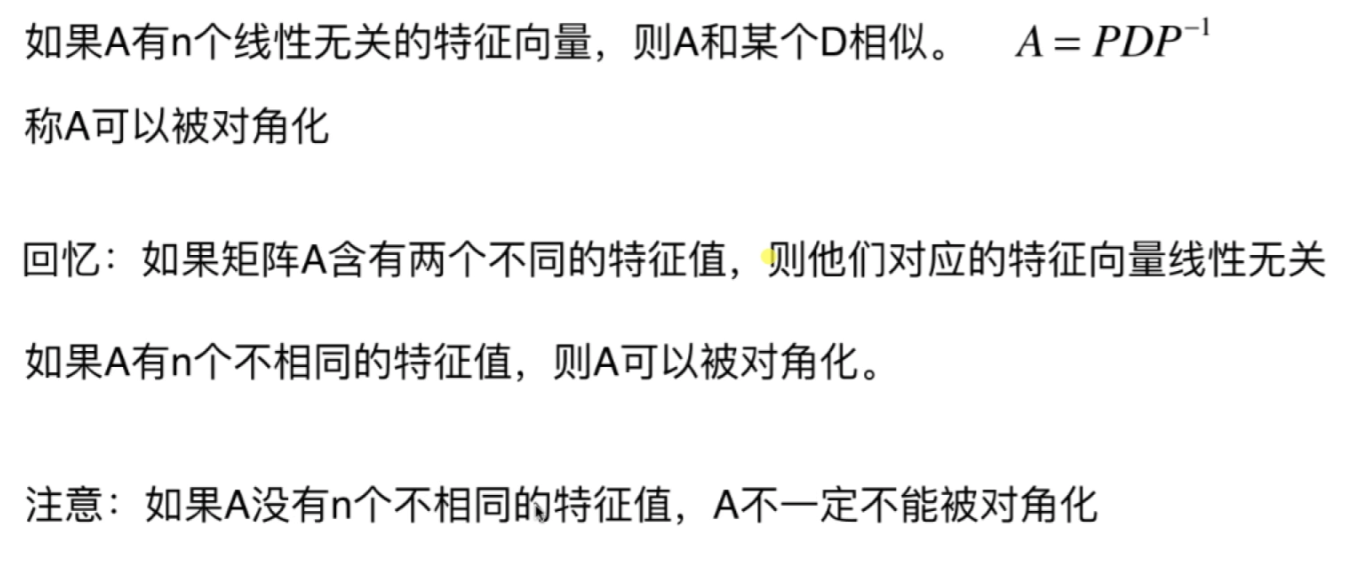
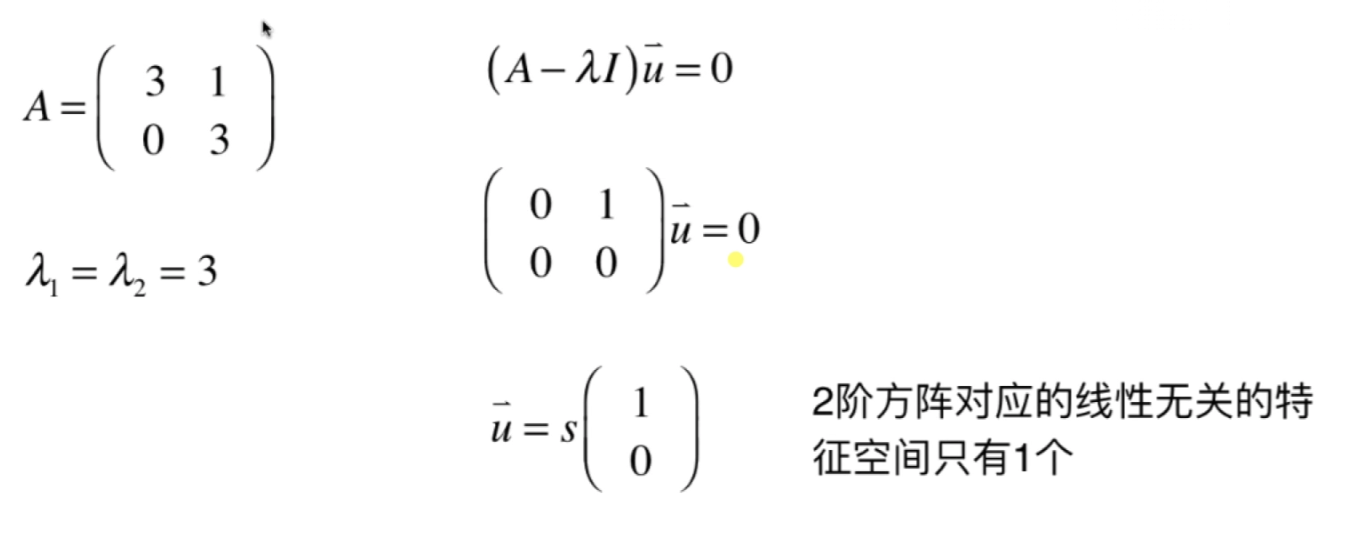
# 代数重数为2但几何重数为1
A5=np.array([[3,1],[0,3]])
eigenvalues5, eigenvectors5 = eig(A5)
print(eigenvalues5)
print(eigenvectors5)
print()
In [14]:
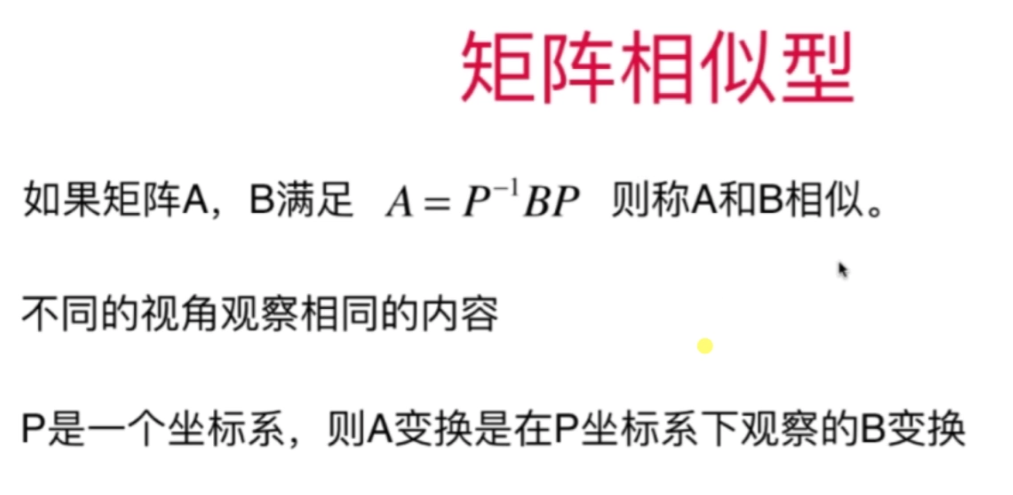
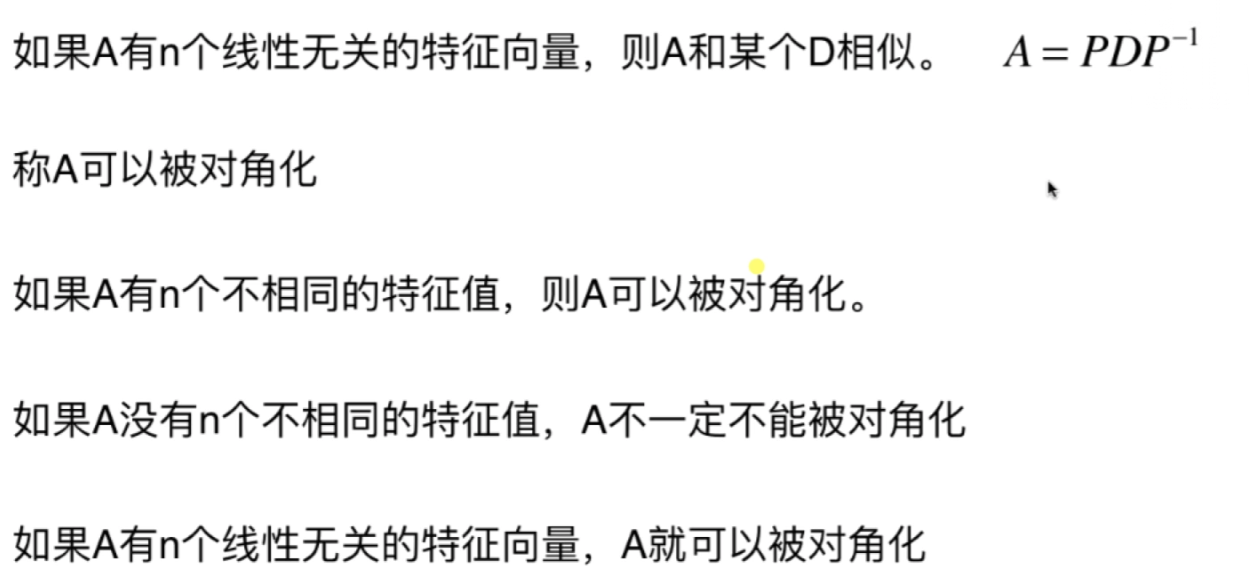
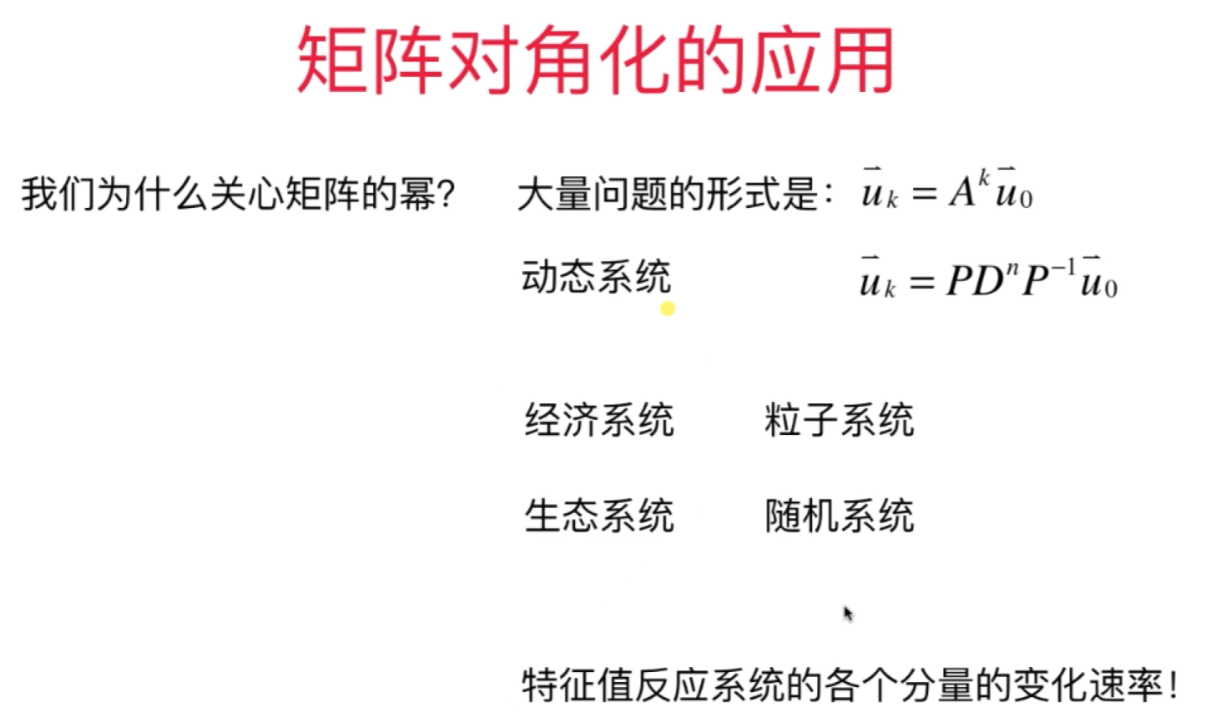
### 矩阵对角化
import numpy as np
from numpy.linalg import eig, inv
from numpy.linalg import matrix_rank
# 或者用自己写的 rank()
def diagonalize(A):
assert A.ndim == 2
assert A.shape[0] ==A.shape[1]
eigenvalues, eigenvectors = eig(A)
P = eigenvectors
if matrix_rank(np.array(P.tolist())) != A.shape[0]:
print("Matrix can not be diagonalized!")
return None, None, None
D = np.diag(eigenvalues)
Pinv = inv(P)
return P, D, Pinv
A1 = np.array([[4,-2],[1,1]])
P1, D1, Pinv1 = diagonalize(A1)
print(P1)
print(D1)
print(Pinv1)
print(P1.dot(D1).dot(Pinv1))
print()
A2 = np.array([[3,1],[0,3]])
P2, D2, Pinv2 = diagonalize(A2)
print(P2)
print(D2)
print(Pinv2)
print()